随着市场需求的增长,下一代先进驾驶辅助系统(ADAS)对摄像头和雷达系统分辨率的要求越来越高。这意味着传输数据的网络、交换机和连接器需要具有更高的速度和更大带宽。汽车技术的创新速度日益加快,采用了更先进的汽车技术,在现有电缆连接基础设施上的数据速率超过了 1 Gbps。更大带宽和更短延迟的网络,将为会引入时间敏感且复杂的未来汽车技术奠定坚实基础。车载以太网拥有高达10 Gbps 的带宽,是满足这些要求的理想选择。如果汽车需要配备带宽高达 3,500 Mbps 的摄像头,我们还必须考虑使用其他技术来传输这些数据。
图1.下一代先进驾驶辅助系统(ADAS)
SerDes 简介
在当今的信息娱乐系统中,车载摄像头和显示器一般是通过 SerDes(串行器/解串器)连接到图像处理电子控制单元(ECU)。个别供应商的产品使用了闭源的专有技术。在扩展 SerDes 链路的覆盖范围时,可能需要以较低的波特率和更高阶的调制方案(例如 PAM-4)运行。此外还需要使用更大带宽的车载以太网链路作为区域之间的主要互连,并且需要采用支持高达10 Gbps 吞吐量的 802.3ch 标准。新兴的 SerDes 标准,如移动产业处理器接口(MIPI)A-PHY 和汽车 SerDes 联盟(ASA),成为许多芯片供应商的关注重点。市场竞争将会推动成本降低,同时还会创造出更多专用功能。业界希望在整个生态系统中建立标准化的测试方法,以满足互操作性要求。对于实施者和测试供应商来说,这样可以统一对芯片供应商、一级供应商和原始设备制造商(OEM)的要求。统一测试要求有助于芯片供应商、一级供应商和 OEM 加快产品开发速度,降低成本并提高与其他商用器件的互操作性。图 2 显示了车载显示器的使用场景。图片来自MIPI 联盟,参考了新发布的 A-PHY 标准。
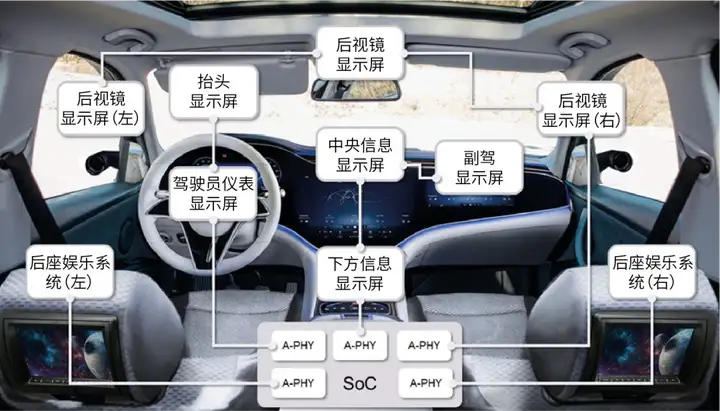
图 2. 使用了 MIPI A-PHY 技术的车载显示器示例
下一代 SerDes 的一些功能(包括协议隧道和自适应功能)支持未来面向服务的体系结构,使新兴的SerDes标准能够通过菊花链式链路将传统的汽车协议转发到相应的 ECU 或桥接器件。如果主链路发生故障,数据流复制功能允许安全关键型系统进行自我复制。菊花链使多个 SerDes 端口可以背对背连接,先将数据聚合到链路上,再传送至 ECU。最后,下一代 SerDes 提供了符合 ISO 26262 的端到端保护机制, 可确保功能的安全性。
这些功能在开发下一代 ADAS/AV 汽车时深受欢迎。当然,工程师仍然需要克服许多挑战,包括不同的介质相关接口(MDI)电缆和连接器、网络安全、与其他供应商产品的互操作性,以及在 PAM-N 网络的****机测试中确保线性度和 PSD 等技术问题。工程师还需要验证接收机抵抗电磁干扰(EMI)的能力,以确保它可以在恶劣的汽车环境中正常运行。这种复杂的测量需要向 SerDes 接收机中注入预定义且经过校准的噪声电平,同时监测其在可接受的误差限制内对符号进行计时的能力。
1.物理层测试
互操作性是一个极其重要的问题。收发信机是非常灵敏的器件,工程师必须测试它在极其恶劣的汽车环境中能否保持正常运行,不受高温、振动、静电放电(ESD)和电磁干扰(EMI)等条件的影响。
我们将测试分为三个不同的领域。传输测试旨在确保发送的信号符合预期。接收机功能测试旨在确定您的器件(网关、模块、交换机或 PHY)接收正确信号的可靠性。最后是链路测试,旨在验证收发信机之间无源互连的性能。物理层验证包括所有这三种测试。所有这些测试的目的是确保来自不同供应商的器件保持互操作性。一辆汽车可能有 100 多家零部件供应商,还需要遵守多个标准组织制定的规范。这些应用软件可以根据现有标准对车载器件进行评测,确保实现良好的数据完整性。
2.传输测试
就****机而言,我们希望确保信号特性良好。因此,我们使用一个工具充当接收机——在本例中为示波器。将被测设备(DUT)设置为一系列已知状态,而接收机确定信号是“有效的”。

图 3. 汽车倒车影像视图,显示传输中存在间隙图 3 是含有线条的倒车影像示例。这些线条表示传输过程中存在间隙,即丢失了数据包。我们仍然可以看到一两个图像,但当有儿童在汽车后面时,我们绝对不希望屏幕闪烁变黑。不同的供应商分别负责制造摄像头、电缆、用于路由信号的开关、用于处理数据的 GPU 或 ECU,以及制动器。供应商必须共同合作,因此互操作性至关重要。此外,新兴标准的数据速率比 CAN 快 100 倍到 1000 倍,而且信号速度越快,传输系统就越复杂。调制类型也变得越来越复杂。CAN 等传统标准使用的是 NRZ 或 PAM-2,而车载以太网和汽车 SerDes 则使用 PAM-3 或 PAM-4。因此,这些****机测试还需要检查数据完整性,其中包括:
• 抖动测试,因为时钟错误可能会导致****机出现抖动。
• 功率谱密度可以表征一定频率范围内的噪声(使用快速傅立叶变换(FFT)或频谱分析仪),因为 PCB 走线在高频状态下可变成天线。
• 线性测试可表征由反射引起的失真,这些失真会导致****机误码和比特误码。
3.通道测试
连接这些器件的电缆、连接器、夹具或线束称为链路或通道。
矢量网络分析仪(VNA)可以表征通道对信号的影响,确保在****机和接收机之间保持良好的信号完整性。考虑到在恶劣的汽车环境中包含大量电缆,如果您需要预测通道在车辆中的性能表现,必须严密监控阻抗随频率的变化。一个链路段由电缆、内联连接器以及两端相配套的连接器组成。最终,线束负责传输控制数据和静荷数 据,并为远程传感器提供直流电源。SerDes 链路的通道表征包括时域和频域分析。工程师需要查看线缆连接系统、MDI、夹具和测试系统要求。目前还没有针对 MDI 连接器的统一标准,但已经出台了一些严格的规范,这有助于减少 MDI 和电缆之间的相互作用。图4 是一个 H-MTD 连接器示例,这个连接器可用于多千兆车载以太网,也可用于新兴 的 SerDes 标准。
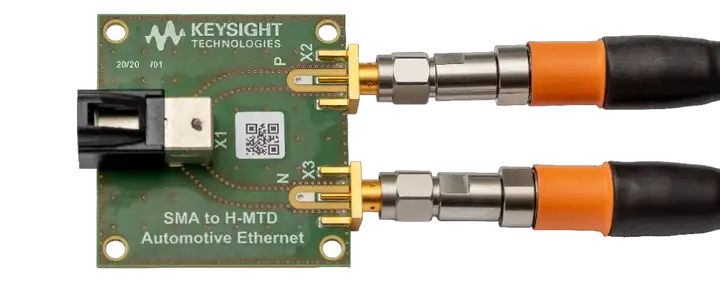
图 4. 配有 H-MTD 和 SMA 接口的 MDI 连接器示例我们在进行通道测试时,需要查看是否有以下错误:• 阻抗失配• 信号失真或缺陷• 电缆之间的串扰
4.接收机测试
接收机负责解码通过链路发送的数据,然后将其传送给 ECU 或显示设备做进一步处理。接收机一旦出现误码,会导致来自安全关键型传感器(如摄像头、雷达和激光雷达)的数据丢失或损坏。传统的接收机功能越来越不适应 PAM-4 等复杂的调制方案,特别是通过长信道传输信号、受到多种噪声源同时干扰的情况。为了表征接收机的性能,工程师必须测量其在受到多个噪声源干扰时的误码水平,包括:• 窄带干扰• 大电流注入 • 在线瞬变• 线外串扰测量系统可以包括噪声源、放大器和耦合电路,以便向有源 SerDes 链路注入精确的噪声电平。接收机必须在受到噪声干扰的情况下也能正确解释符号。接收机测试的重点在于,确保接收机在受到干扰时仍能保持较低的比特误码率(BER)。
5.未来预测
未来汽车将会配备更多的摄像头、连接和传感器,它们将更准确、更轻盈、更安全。毫无疑问,要应对这些挑战,必须在汽车中部署一个车载网络。这些车载网络必须具有良好的互操作性,安全可靠。
内容来源:是德科技
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
1500536942 阅读:2951
eleaction01 阅读:3997
